Utilizing currently available technology along with innovative robotic solutions, a wide gamut of spectral data for live monitoring or periodic evaluation for a variety of applications can be collected. Robots can be sent on reconnaissance missions in dangerous or hard to reach places and return vital information when you need it most. Each application warrants an appropriate platform on the ground, in the sea or in the air helping you make decisions based on the most current data.
Whether it be Search & Rescue, film location research, urban planning, social studies, environmental surveying, construction site monitoring, to name a few, robotic platforms go where we can’t go, see what we can’t see, longer, faster, safer on land, in the sea and in the air. Able to collect a wide gamut of visual and non-visual data quickly and efficiently, drones whether flying, swimming or crawling can be an excellent tool to observe and survey large remote or dangerous areas.
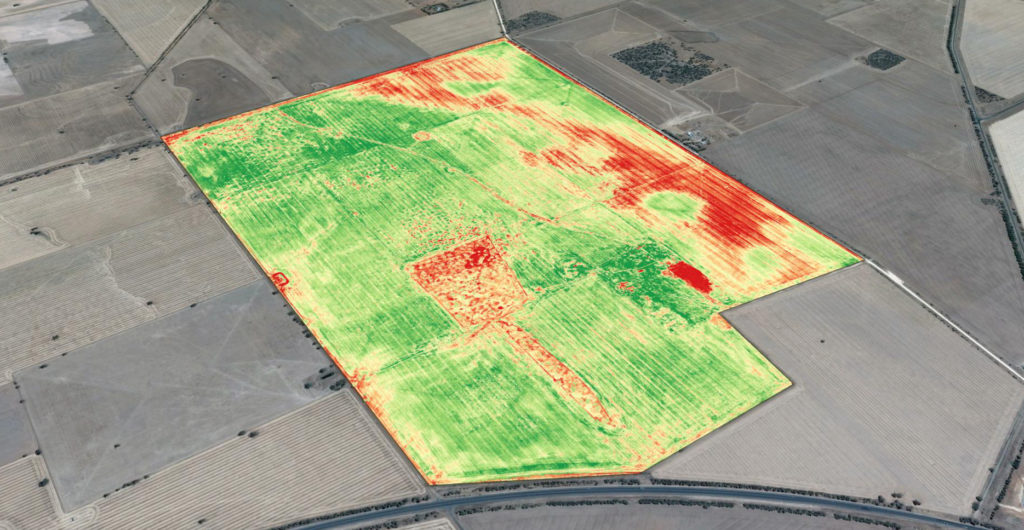
In practically any environment, position (GPS), 3D imaging, visual data (photographs) and non-visual (infrared) over large areas can be attained quickly and effectively. Visual data layered with data such as GPS location, mapping, infrared as well as interpreted non-spectral data vitally informs research and monitoring project.
Christopher is actively developing ground based and aquatic robotic systems to survey remote, dangerous or difficult to get to areas. The Ball Robot is designed to be used in Search and Rescue scenarios to be thrown into dangerous situations and actively navigate a dangerous or hard to reach place to search victims and assist in rescue. A platform like this could also be used by researchers in the field who need to “look around the bend”, research what’s beyond your field of vision and return live or recorded information.