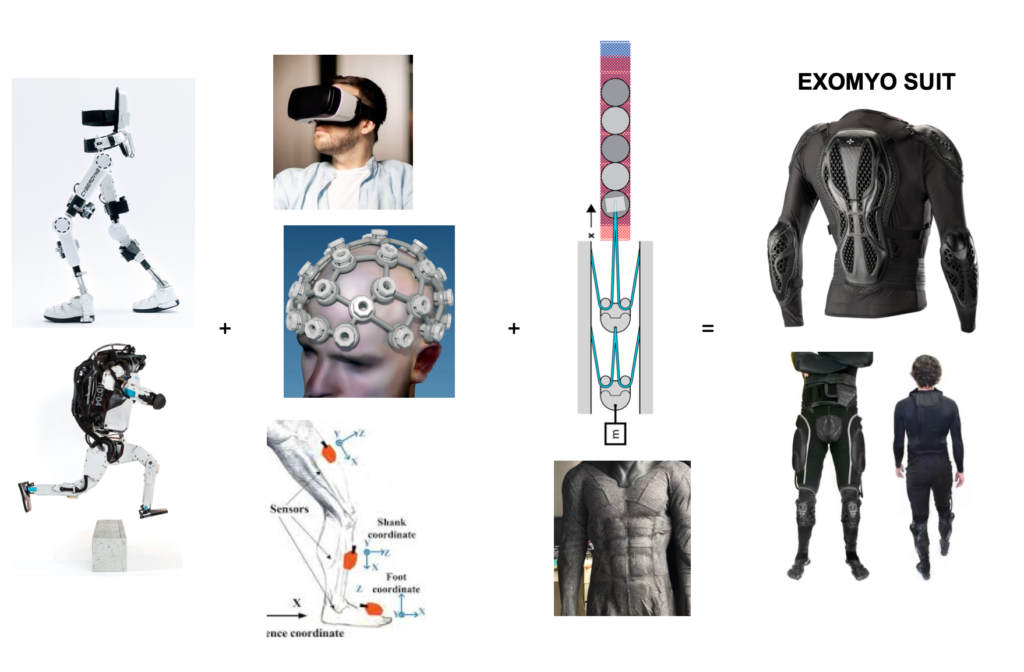
![]() Recent strides in robotic motion, both in hardware and software have made more natural bipedal mobility a possibility. Leveraging existing and novel approaches, Maschinenmensch will partner mobility technologies and machine learning solutions along with a BCI control system to achieve balanced, efficient bipedal movement for a partial to fully paralyzed individual. For control, we will leave balance and movement up to robotic algorithms and the intent to the human. The suit itself will utilize the body’s existing skeleton and adds a soft shell “muscle” (myo Greek) with electromagnetic actuators, not so much an “exoskeleton” as an “exomyo”.
Recent strides in robotic motion, both in hardware and software have made more natural bipedal mobility a possibility. Leveraging existing and novel approaches, Maschinenmensch will partner mobility technologies and machine learning solutions along with a BCI control system to achieve balanced, efficient bipedal movement for a partial to fully paralyzed individual. For control, we will leave balance and movement up to robotic algorithms and the intent to the human. The suit itself will utilize the body’s existing skeleton and adds a soft shell “muscle” (myo Greek) with electromagnetic actuators, not so much an “exoskeleton” as an “exomyo”.
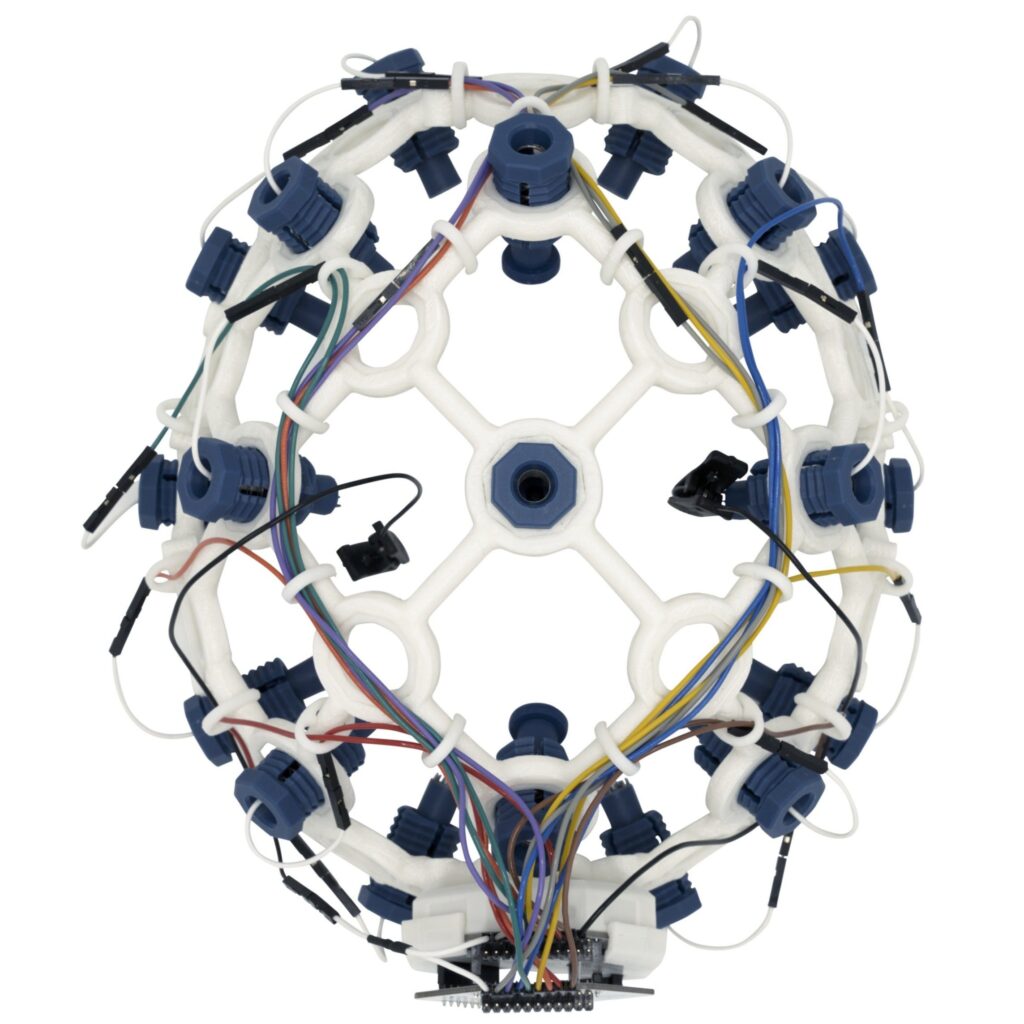
A machine learning trained system robotic system will manage balance and power of the bionic system while the BCI and muscle sensors will allow the user to control pace and direction. With today’s technology, the development of a full bodied powered assistive body suit is within reach. Over the past decade, the systems have become dramatically more agile and effective with lighter, stronger materials, efficient, low profile actuators, efficient, powerful long lasting batteries and more natural algorithms for balance and gait. Companies and universities have been developing amazing algorithms for bipedal robotic walking – even jumping, running, flipping and parkour (see Boston Dynamics). Currently available motorized and/or mechanized exoskeletons have benefited from these advancements.